
简易弹簧质点系统实现
弹簧质点系统(Mass-Spring System)
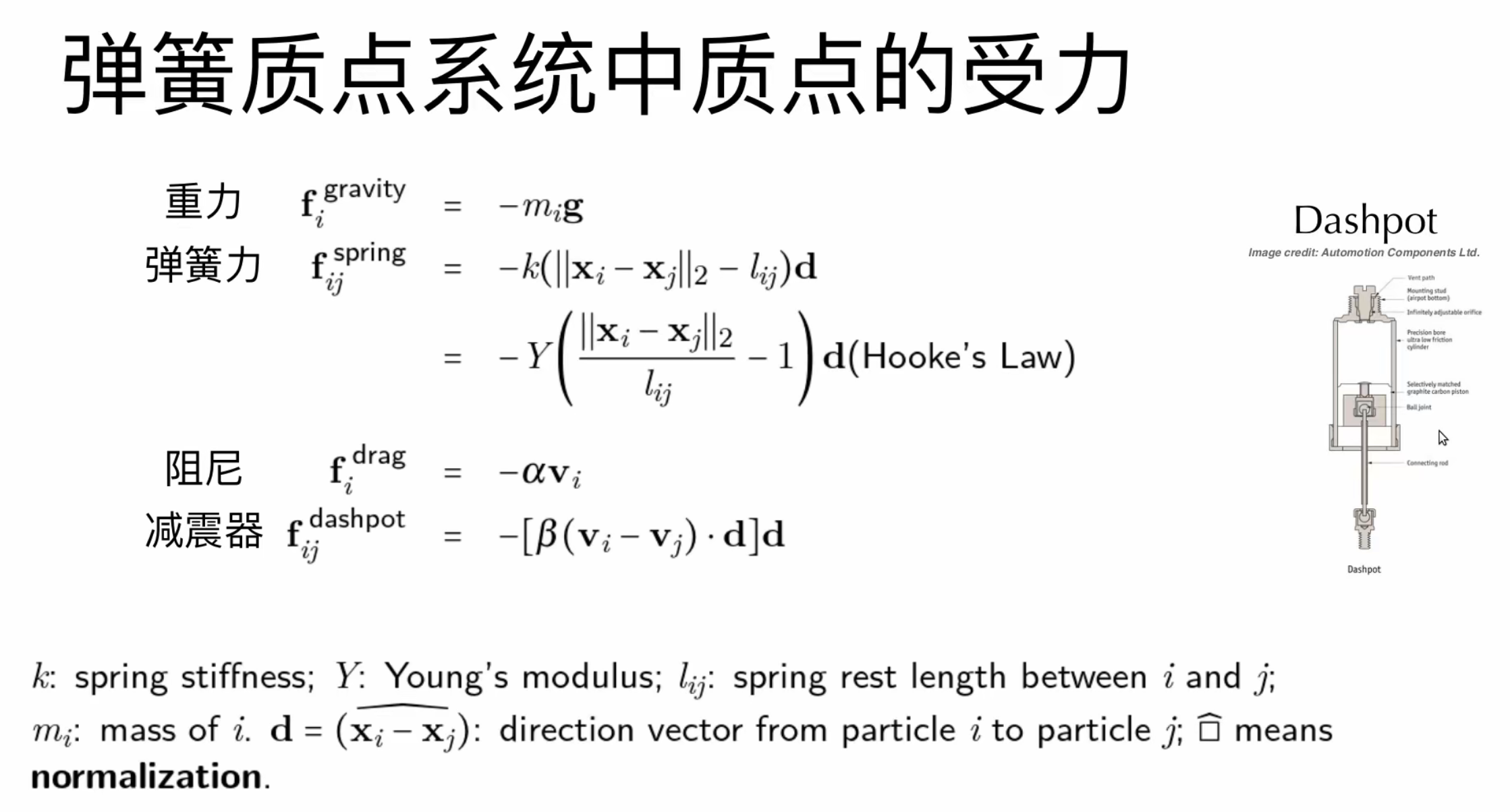
弹簧质点系统算是最简单的一种物理模型,它假设所有物体除了质点,便是连接质点的弹簧。在这种情况下,我们需要分析的力非常简单,基本上只用考虑重力以及弹簧力即可。公式则如下图所示。
代码地址: https://github.com/WeebOwO/MassSpringSystem
具体实现
整体的结构如下面的伪代码所示,我们在主循环里面首先处理一下各种事件,然后物理引擎往前步进一段时间,最后提交给渲染器进行渲染。
1 | # main loop |
而具体到这个engine.step()函数,我们所做的事情则是计算每个点的受力,并根据受力计算出对应的速度,加速度,以及对应的位移。
1 | # engine.step() |
从更为专业的术语上解释的话,我们其实是在各个离散的时间步长上进行物理量的累加,从而模拟连续世界中的积分。因为在实际物理世界中有加速度的存在,物体每个时间的速度都不相同,我们应该根据速度在时间的积分来得到真正的位移,但是计算机是无法做到所谓的“连续”的,所以我们进而采用了在每个细小时间步长上进行累加的做法。而这种模拟方法其实也有各种各样的流派,我们所使用的是较为简单的欧拉方法。
欧拉方法主要有三种流派
显式欧拉方法(explicit Euler method)
半隐式欧拉方法(semi-implicit Euler method):
隐式欧拉方法(implicit Euler method) :
我们在这里所使用的是半隐式欧拉方法(semi-implicit Euler method)来进行模拟,代码可以描述为如下。
1 | # calclate_force |
1 | # sovle |
在计算力的阶段,我们首先把当前所有的质点的力都假设为只有重力,然后再遍历其他的质点,如果发现两个质点有弹簧,那么我们就计算下当前质点所受到的弹簧力。而求解的话则是按照我们之前所讲的根据力来进行加速度,速度,以及位移的迭代。
最后的运行的效果如下图所示(可能加载的会有些慢,大概是1m左右的gif图)
总结
弹簧质点系统本身的实现并不困难,但是看起来还是蛮有意思的,并且也能学习到物理引擎大体上是怎么个流程,也算是有点收获吧。